
常州江苏大学工程技术研究院
Changzhou Engineering and Technology Institute of Jiangsu University
一、项目成果简介
线性控制制动踏板装置是一种用于电动汽车或智能汽车上的制动踏板装置,此装置利用位移传感器、压力传感器、电磁铁等模块,代替传统的真空助力液压制动方式,模拟制动踏板特性,即实现制动踏板位移和制动踏板反馈力之间的关系,从而实现制动系统的电控化。如图1所示为课题组开发的制动踏板模拟器结构示意图,该装置拥有完全自主知识产权,台架试验结果表明,该样机能完全模拟传统制动踏板特性,实现整车线性制动。
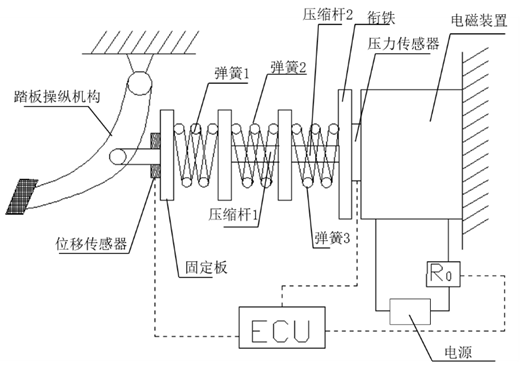
图1 制动踏板模拟器结构示意图
二、性能指标
线性控制制动踏板装置,能达到如下性能:
1)以制动踏板位移作为输入信号,能计算并输出信号控制制动执行机构输出所需制动力矩
2)能代替传统的真空助力器,实现制动助力;
3)能模拟传统制动踏板,反馈制动踏板反馈力,并且反馈力大小可调;
4)能缩短机械间隙及液压气隙引起的制动反应时间,反应时间控制在0.1s以内。
三、适用范围、市场前景
线性控制制动踏板装置适用于内燃机驱动的乘用车,以及新能源、纯电动汽车等各类车辆。其目的是实现汽车制动系统控制的电气化。
项目领域属于车辆节能环保技术领域,使用该系统能取代传统的真空助力装置及液压管路控制系统,有利于车辆结构的简化,提高制动反应速度,促进汽车行驶的安全性。
四、合作方式
本项目合作方式可以技术开发、产学研,也可以知识产权授权或转让。




