
常州江苏大学工程技术研究院
Changzhou Engineering and Technology Institute of Jiangsu University
【成果简介】
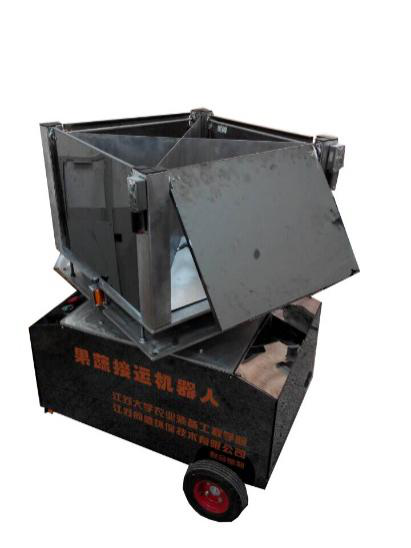
适用于我国温室果蔬栽培,采摘阶段后自动运输需求的一种现代高科技果蔬自动转运装备。它采用了现代先进的机电一体化技术,具有以下独特功能:
1、能够在温室槽栽槽、新型高架栽培等行间通道自动行走作业;
2、能够人工进行路径规划和功能模式的选择控制;
3、通过四个储料箱水平回转分级收集被采果蔬并运输至产后储放处理区域,并完成箱门自动开启的倾斜底板倾倒卸料。
【性能指标】
(1)功率及配电:1.5Kw,直流;
(2)尺寸:900x600x1300mm;
(3)底盘:双轮独立驱动;
(4)行走速度:0~0.5m/s;
(5)料箱容积: 80L四等分;
(6)放料方式:水平回转分级放料
(7)导航方式:电磁导引+激光扫描测距;
(8)卸料方式:自动开门倾倒
【所处阶段】
目前已在合作单位的温室果蔬栽培过程中应用生产。
【应用范围】
针对温室人工采摘与机器人采摘后的现场自动运输而设计, 通过四个储料箱水平回转分级收集被采果蔬并运输至产后储放处理区域,并完成箱门自动开启的倾斜底板倾倒卸料。实现了温室现场被采果蔬的分类收集、运输、卸料自动化,并为机器人采摘-分级运输协同作业提供了装备支持。
【拟合作方式】
技术转让、技术入股




