
常州江苏大学工程技术研究院
Changzhou Engineering and Technology Institute of Jiangsu University
【成果简介】
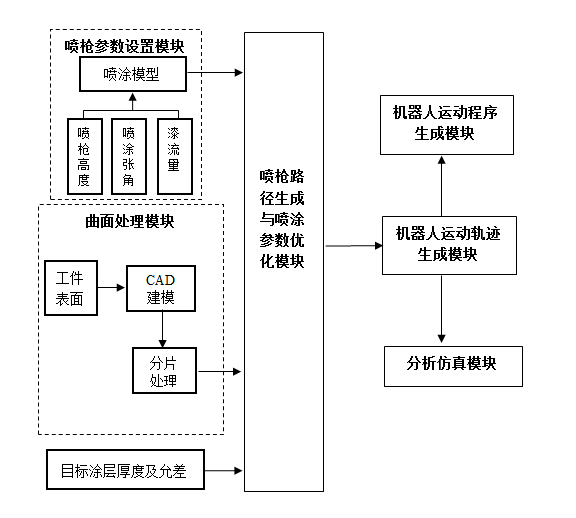
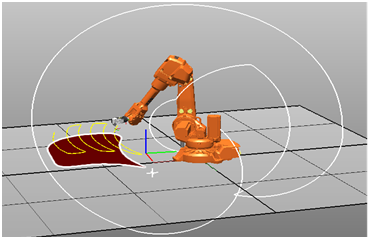
该成果基于机器人离线编程方法对复杂形面进行数字化喷涂轨迹规划,以解决目前人工示教编程方法示教周期长、喷涂质量不稳定的问题。通过对喷涂过程中的涂膜厚度分布模型进行建模,对大型喷涂表面进行分片处理,对影响喷涂质量、喷涂效率和涂料利用率的喷涂路径生成算法和喷涂过程中的喷涂速率、喷枪位姿进行优化研究,形成喷涂轨迹规划知识库,结合现有的离线编程软件进行喷涂轨迹规划二次开发,实现复杂形面高质高效绿色喷涂轨迹的自动规划。
目前该项成果尚处于研发阶段,目前已累计授权发明专利5件,该成果转化后对完善喷涂机器人离线编程系统,提升机器人喷涂自动化水平具有重要的工程应用价值,能加速喷涂机器人在复杂形面零件涂装中的推广应用,经济效益显著。希望能与机器人工业软件公司、机器人集成商进行合作。
【拟合作方式】
合作开发,技术咨询,技术服务




