
常州江苏大学工程技术研究院
Changzhou Engineering and Technology Institute of Jiangsu University
一、项目成果简介
本项目面向多机型农机无人驾驶作业,研发了一套跨平台的导航决策软件及其数据协议,集成导航信号处理、全田块路径规划、自动避障以及路径跟踪决策等功能,与外部位姿传感器、角度传感器和导航控制器集成后可实现农机全田块无人驾驶。软件系统采用Qt/C++和多线程技术编程实现,易于部署在嵌入式和X86硬件平台,且已分别在工业电脑和ARM平台使用与测试。
其次,项目开发了芯片级集成的定位模块及控制器模块,具有成本低、可靠性高的特点,便于与上述导航决策系统集成,一体化程度高、易于维护。

嵌入式Linux平台软件部署与测试
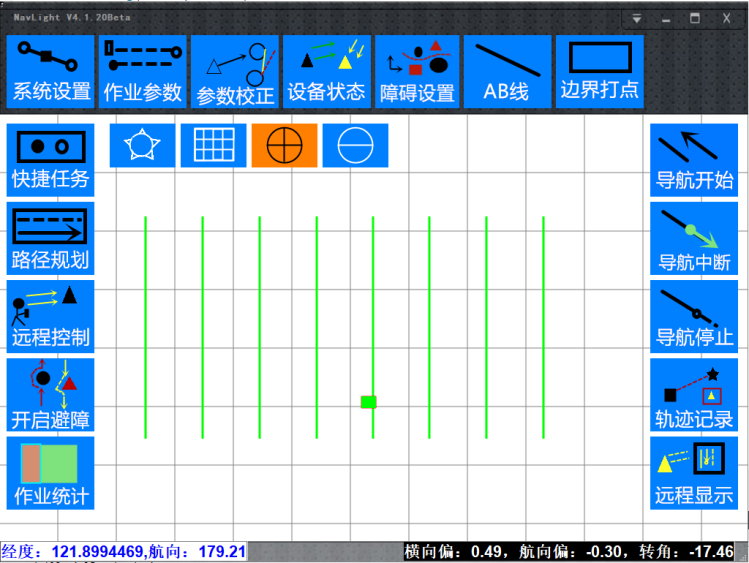
Windows平台软件部署
二、性能指标
本成果目前拥有1项软件著作权,6项受理发明专利申请、1项受理PCT申请;实际作业时,输出决策参数更新率大于20Hz、横向位置误差小于3cm (RMS),软件可稳定运行在50Hz的界面刷新率上。
三、适用范围、市场前景
适用于智慧农业中的智能农机,如农机自动驾驶及其远程调度管理。
四、投资概算
配套软硬件设备、试验场地,额度10-200万。
五、合作方式
技术转让,合作开发,技术交易额面议。




